

Encoding is the process of converting data into a format required for a number of information processing needs, including Program compiling and execution.
Mechanisms for digital-to-digital encoding fall into the following categories:
Digital encoding is of three types-
1. Unipolar
2. Polar
3. Bipolar
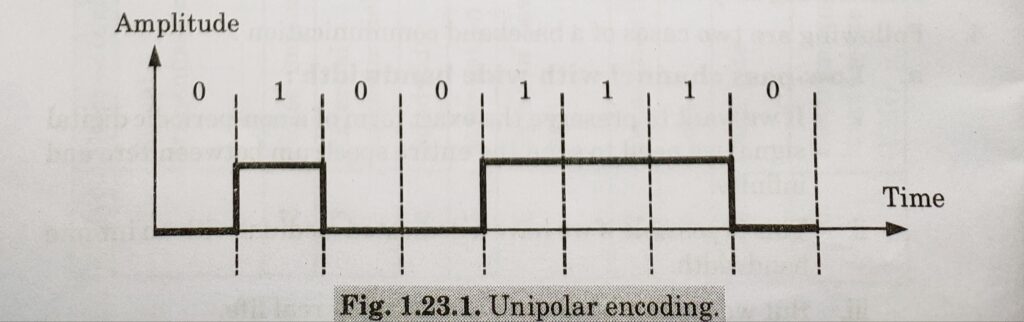
A. Unipolar digital encoding
1. Unipolar encoding is very simple and primitive.
2. Unipolar encoding uses only one polarity.
3. In unipolar encoding, all the signal levels are on one side of the time axis, either above or below.
a. NRZ (Non-Return-to-Zero) :
i. In a non-return-to-zero (NRZ) scheme the voltage defines bit 1 and the zero voltage defines bit 0.
ii. Since the signal does not return to zero at the middle of the bit it is called NRZ.
B. Polar digital encoding
1. The polar encoding uses two voltage levels: one positive and one negative.
2. By using both levels, the average voltage level on the line gets reduce in most of the polar encoding.
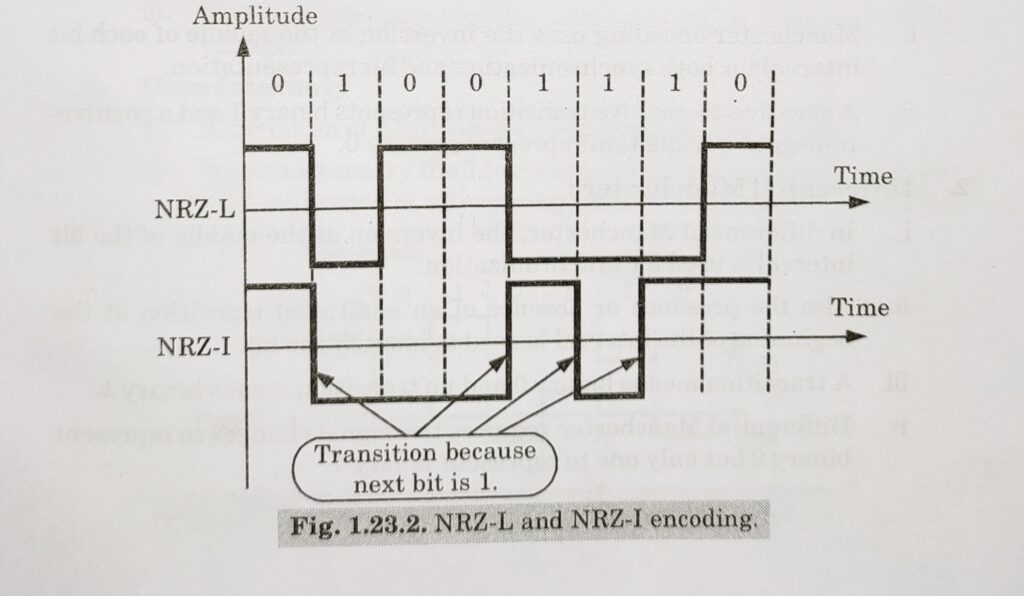
3. NRZ encoding includes two methods: nonreturn to zero, level (NRZ-L), and nonreturn to zero, invert (NRZ-I).
a. NRZ L
i. In NRZ-L encoding, the level of the signal depends on the type of bit it represents.
ii. A positive voltage usually means the bit is a 0, and a negative voltage means the bit is a 1 (or vice versa). iii. Thus, the level of the signal is dependent on the state of the bit represents.
b. NRZ-I:
i. In NRZ-I, an inversion of the voltage level represents a 1 bit.
ii. It is the transition between a positive and a negative voltage that represents a 1 bit.
iii. A 0 bit is represented by no change.
iv. NRZ-I is superior to NRZ-L due to the synchronization provided by the signal change each time a 1 bit is encountered.
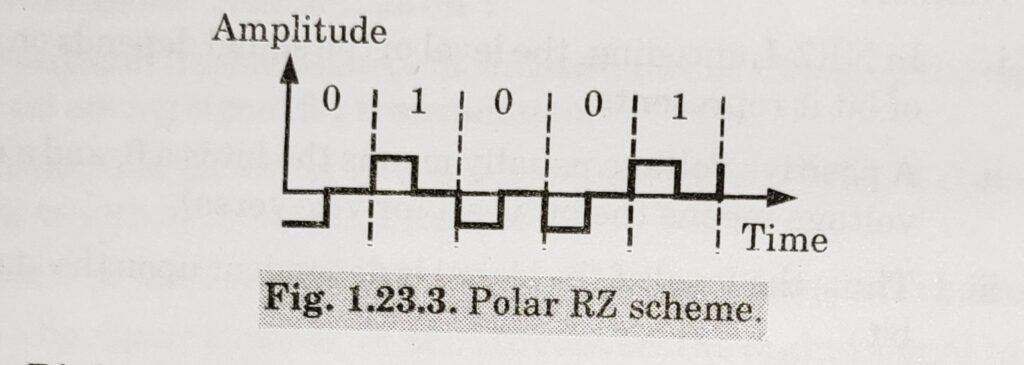
c. Return to Zero (RZ):
i. In NRZ encoding problem occurs when the sender and receiver clocks are not synchronized.
ii. The receiver does not know when one bit has ended and the n.next bit is starting.
iii. The solution to this problem is a return-to-zero (RZ) scheme.
iv. RZ scheme uses three values: positive, negative, and zero.
v. In RZ, the signal changes not between bits but during the bit.
d. Biphase:
i. In bi-phase encoding, the signal changes at the middle of the bit interval but does not return to zero.
ii. Instead, it continues to the opposite pole.
iii. These mid-interval transitions allow for synchronization.
iv. There are two types of biphase encoding: Manchester and differential Manchester.
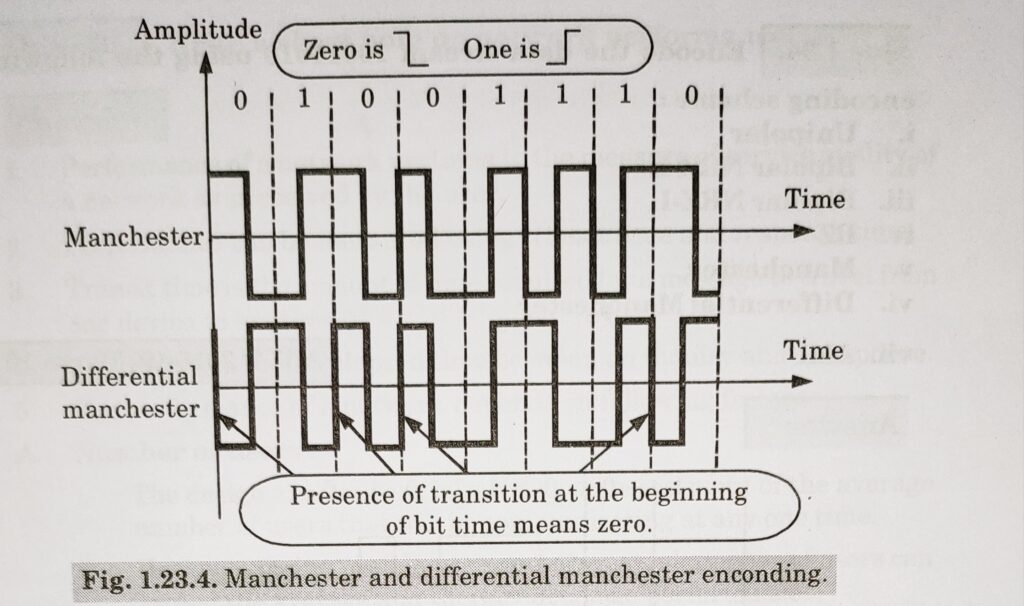
1. Manchester:
i. Manchester encoding uses the inversion at the middle of each bit interval for both synchronization and bit representation.
ii. A negative-to-positive transition represents binary I and a positive-to-negative transition represents binary 0.
2. Differential Manchester
i. In differential Manchester, the inversion at the middle of the bit interval is used for synchronization.
ii. Also, the presence or absence of an additional transition at the beginning of the interval is used to identify the bit.
iii. A transition means binary 0 and no transition means binary 1.
iv. To represent binary 0 and binary 1 manchester requires two signal changes.
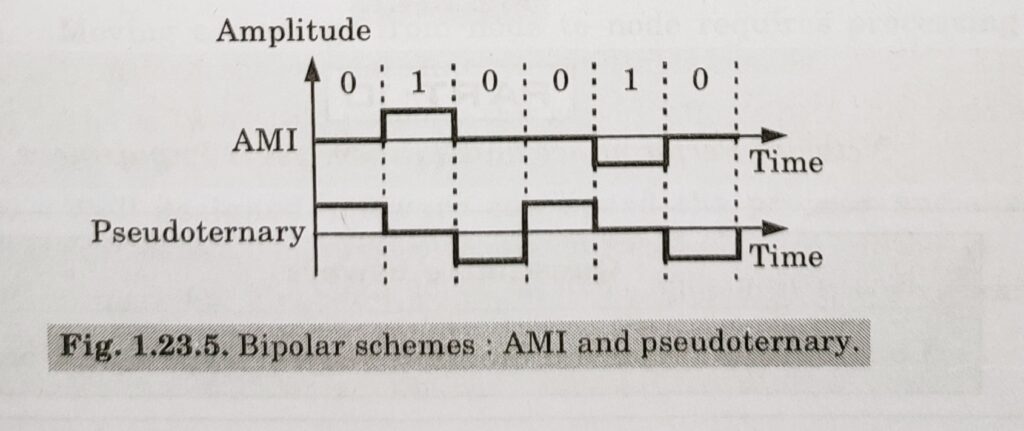
C. Bipolar digital encoding
1. In bipolar encoding, we use three levels: positive, zero, and negative.
2. The voltage level for one data element is at zero, while the voltage level for the other element alternates between positive and negative.
3. There are two variations of bipolar encoding: AMI and pseudo ternary.
a. Alternate Mark Inversion (AMI) :
i. In AMI the word ‘mark’ means 1. So AMI means alternate 1 inversion.
ii. A neutral zero voltage represents binary 0.
iii. Binary Is are represented by alternating positive and negative voltages.
b. Pseudo ternary:
i. A variation of AMI encoding is called pseudo ternary.
ii. In pseudo ternary the 1 bit is encoded as a zero voltage and the 0 bit is encoded as alternating positive and negative voltages.
Read more about Signal Transmission


